2D Cameras¶
The robot head is composed of three cameras:
- two 2D Cameras, and
- one 3D Sensor.
Camera indexes¶
The camera indexes are:
| Parameter ID Name | ID Value | Description |
|---|---|---|
| AL::kTopCamera | 0 | camera on the top. |
| AL::kBottomCamera | 1 | camera on the bottom. |
| AL::kDepthCamera | 2 | 3D camera in the eyes. |
2D Cameras¶
Two identical video cameras are located in the forehead. They provide a resolution up to 2560*1920 at 1 frames per second (fps) or 640*480 at 30 fps.
Specifications¶
| Camera | Model | OV5640 |
| Type | SOC Image Sensor | |
| Imaging Array | Resolution | 5Mp |
| Optical format | 1/4 inch | |
| Active Pixels (HxV) | 2592x1944 | |
| Sensitivity | Pixel size | 1.4µm*1.4µm |
| Dynamic range | 68db@8x gain |
|
| Signal/Noise ratio (max) | 6dB (maximum) | |
| Responsivity | 600 mV/Lux-sec | |
| Output | Camera output | 640*480@30fps or 2560*1920@1fps |
| Data Format | YUV422 color space | |
| Shutter type | Rolling shutter / frame exposure | |
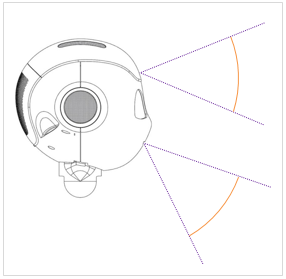
| View | Field of view | 68.2°DFOV (57.2°HFOV,44.3°VFOV) |
| Focus range | 30cm ~ infinity | |
| Focus type | Auto focus |
Parameters¶
The camera has a list of parameters which can be modified.
Model¶
Camera Model has the following value:
| Parameter ID Name | ID Value | Description |
|---|---|---|
| AL::kOV5640 | 3 | HD Camera |
Supported parameters¶
Software parameters¶
| Parameter | Min value | Max value | Default value | Camera ID name | ID value |
|---|---|---|---|---|---|
| Keep Alive | 0 | 1 | 0 | kCameraKeepAliveID | 35 |
Hardware parameters¶
| Parameter | Min Value | Max Value | Default Value | Camera ID name | ID Value | Remarks |
|---|---|---|---|---|---|---|
| Brightness | 0 | 255 | 0 | kCameraBrightnessID | 0 | |
| Contrast | 0 | 127 | 32 | kCameraContrastID | 1 | |
| Saturation | 0 | 255 | 64 | kCameraSaturationID | 2 | |
| Hue | -180 | 180 | 0 | kCameraHueID | 3 | |
| Horizontal Flip | 0 | 1 | 0 | kCameraHFlipID | 7 | |
| Vertical Flip | 0 | 1 | 0 | kCameraVFlipID | 8 | |
| Auto Exposition | 0 | 1 | 1 | kCameraAutoExpositionID | 11 | |
| Auto White Balance | 0 | 1 | 1 | kCameraAutoWhiteBalanceID | 12 | |
| Auto Gain | 0 | 1 | 1 | kCameraAutoGainID | 13 | |
| Gain | 0 | 1024 | NA | kCameraGainID | 6 | Read only if auto gain enabled |
| Exposure | 0 | 65536 | NA | kCameraExposureID | 17 | Read only if auto exposure enabled |
| Reset camera registers | 0 | 1 | 0 | kCameraSetDefaultParamsID | 19 | 1: reset camera and reset parameter to 0 |
| BLC red value | 0 | 4096 | NA | kCameraBlcRedID | 30 | Read Only |
| BLC green value | 0 | 4096 | NA | kCameraBlcGbID or kCameraBlcGrID | 31 or 32 | Read only |
| BLC blue value | 0 | 4096 | NA | kCameraBlcBlueID | 29 | Read only |
| Resolution | kQVGA | kVGA | kQVGA | kCameraResolutionID | 14 | Not to be set manually |
| Frames Per Second | 1 | 30 | 1 | kCameraFrameRateID | 15 | Not to be set manually |
| Average Luminance | 0 | 255 | NA | kCameraAverageLuminanceID | 39 | Read only |
| Auto Focus | 0 | 1 | 1 | kCameraAutoFocusID | 40 | 0: disabled 1: enabled |
Supported colorspaces¶
A color space is a model describing the way to represent color as an ordered list of numbers. For example you can represent the color of each pixel of your screen as a list of three elements R, G and B. Which are respectively the value of Red, Green, and Blue usually stored in an byte (range from 0 to 255).
Setting the color space allows you to set the image buffer encoding in
AL::ALImage.
Color space parameter for 2D camera can have the following values:
| Parameter ID Name | ID Value | Number of layers | Number of channels | Description |
|---|---|---|---|---|
| AL::kYuvColorSpace | 0 | 1 | 1 | Buffer only contains the Y (luma component) equivalent to one unsigned char |
| AL::kyUvColorSpace | 1 | 1 | 1 | Buffer only contains the U (Chrominance component) equivalent to one unsigned char |
| AL::kyuVColorSpace | 2 | 1 | 1 | Buffer only contains the V (Chrominance component) equivalent to one unsigned char |
| AL::kRgbColorSpace | 3 | 1 | 1 | Buffer only contains the R (Red component) equivalent to one unsigned char |
| AL::krGbColorSpace | 4 | 1 | 1 | Buffer only contains the G (Green component) equivalent to one unsigned char |
| AL::krgBColorSpace | 5 | 1 | 1 | Buffer only contains the B (Blue component) equivalent to one unsigned char |
| AL::kHsyColorSpace | 6 | 1 | 1 | Buffer only contains the H (Hue component) equivalent to one unsigned char |
| AL::khSyColorSpace | 7 | 1 | 1 | Buffer only contains the S (Saturation component) equivalent to one unsigned char |
| AL::khsYColorSpace | 8 | 1 | 1 | Buffer only contains the Y (Brightness component) equivalent to one unsigned char |
| AL::kYUV422ColorSpace | 9 | 2 | 2 | Native format, 0xY’Y’VVYYUU equivalent to four unsigned char for two pixels. With Y luma for pixel n, Y’ luma for pixel n+1, and U and V are the average chrominance value of both pixels. |
| AL::kYUVColorSpace | 10 | 3 | 3 | Buffer contains triplet on the format 0xVVUUYY, equivalent to three unsigned char |
| AL::kRGBColorSpace | 11 | 3 | 3 | Buffer contains triplet on the format 0xBBGGRR, equivalent to three unsigned char |
| AL::kHSYColorSpace | 12 | 3 | 3 | Buffer contains triplet on the format 0xYYSSHH, equivalent to three unsigned char |
| AL::kBGRColorSpace | 13 | 3 | 3 | Buffer contains triplet on the format 0xRRGGBB, equivalent to three unsigned char |
| AL::kYYCbCrColorSpace | 14 | 2 | 2 | TIFF format, four unsigned characters for two pixels. |
| AL::kH2RGBColorSpace | 15 | 3 | 3 | H from “HSY to RGB” in fake colors. |
| AL::kHSMixedColorSpace | 16 | 3 | 3 | HS and (H+S)/2. |
Supported resolutions¶
Resolution parameter can have the following values:
| Parameter ID Name | ID Value | Description |
|---|---|---|
| AL::kQQQQVGA | 8 | Image of 40*30px |
| AL::kQQQVGA | 7 | Image of 80*60px |
| AL::kQQVGA | 0 | Image of 160*120px |
| AL::kQVGA | 1 | Image of 320*240px |
| AL::kVGA | 2 | Image of 640*480px |
| AL::k4VGA | 3 | Image of 1280*960px |
| AL::k16VGA | 4 | Image of 2560*1920px |
Note
The camera OV5640 can only run internally in VGA, 16VGA, otherwise scale down is performed (without binning or linear interpolation).
Note
When camera OV5640 is use with 1080p,subscribers with other formats have undefined behavior.
Supported framerates¶
Here a list of supported frame rates according to resolution set.
| Resolution | Supported Framerate |
|---|---|
| AL::kQQQQVGA | from 1 to 30 fps |
| AL::kQQQVGA | from 1 to 30 fps |
| AL::kQQVGA | from 1 to 30 fps |
| AL::kQVGA | from 1 to 30 fps |
| AL::kVGA | from 1 to 30 fps |
| AL::k4VGA | 1 fps |
| AL::k16VGA | 1 fps |