Actuator & Sensor list¶
| Battery - CPU - FSR- Inertial - Joints and Actuators - LEDs - Sonars - Switches - Touch sensors |
Note
Joints and Actuators¶
|
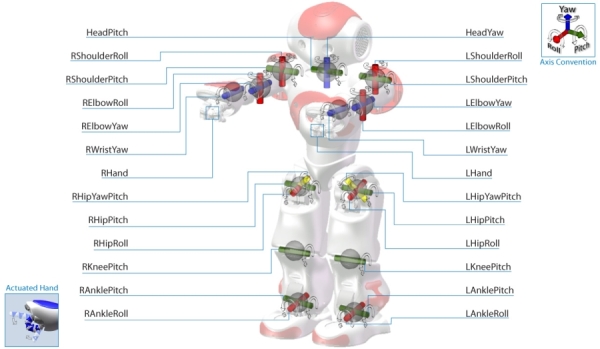
HeadYaw¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/HeadYaw/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/HeadYaw/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/HeadYaw/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/HeadYaw/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/HeadYaw/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/HeadYaw/Temperature/Sensor/Status | Temperature status |
See also: Head joints.
HeadPitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/HeadPitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/HeadPitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/HeadPitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/HeadPitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/HeadPitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/HeadPitch/Temperature/Sensor/Status | Temperature status |
See also: Head joints.
LElbowYaw¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LElbowYaw/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LElbowYaw/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LElbowYaw/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LElbowYaw/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LElbowYaw/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LElbowYaw/Temperature/Sensor/Status | Temperature status |
See also: Left Arm joints.
LElbowRoll¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LElbowRoll/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LElbowRoll/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LElbowRoll/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LElbowRoll/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LElbowRoll/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LElbowRoll/Temperature/Sensor/Status | Temperature status |
See also: Left Arm joints.
RElbowYaw¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RElbowYaw/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RElbowYaw/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RElbowYaw/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RElbowYaw/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RElbowYaw/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RElbowYaw/Temperature/Sensor/Status | Temperature status |
See also: Right Arm joints.
RElbowRoll¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RElbowRoll/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RElbowRoll/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RElbowRoll/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RElbowRoll/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RElbowRoll/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RElbowRoll/Temperature/Sensor/Status | Temperature status |
See also: Right Arm joints.
LHand¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LHand/Position/Actuator/Value | Position/Actuator (%) |
| Device/SubDeviceList/LHand/Position/Sensor/Value | Position/Sensor (%) |
| Device/SubDeviceList/LHand/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LHand/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LHand/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LHand/Temperature/Sensor/Status | Temperature status |
See also: Left Arm joints.
LWristYaw¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LWristYaw/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LWristYaw/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LWristYaw/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LWristYaw/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LWristYaw/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LWristYaw/Temperature/Sensor/Status | Temperature status |
See also: Left Arm joints.
RHand¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RHand/Position/Actuator/Value | Position/Actuator (%) |
| Device/SubDeviceList/RHand/Position/Sensor/Value | Position/Sensor (%) |
| Device/SubDeviceList/RHand/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RHand/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RHand/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RHand/Temperature/Sensor/Status | Temperature status |
See also: Right Arm joints.
RWristYaw¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RWristYaw/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RWristYaw/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RWristYaw/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RWristYaw/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RWristYaw/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RWristYaw/Temperature/Sensor/Status | Temperature status |
See also: Right Arm joints.
LShoulderPitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LShoulderPitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LShoulderPitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LShoulderPitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LShoulderPitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LShoulderPitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LShoulderPitch/Temperature/Sensor/Status | Temperature status |
See also: Left Arm joints.
LShoulderRoll¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LShoulderRoll/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LShoulderRoll/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LShoulderRoll/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LShoulderRoll/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LShoulderRoll/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LShoulderRoll/Temperature/Sensor/Status | Temperature status |
See also: Left Arm joints.
RShoulderPitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RShoulderPitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RShoulderPitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RShoulderPitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RShoulderPitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RShoulderPitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RShoulderPitch/Temperature/Sensor/Status | Temperature status |
See also: Right Arm joints.
RShoulderRoll¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RShoulderRoll/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RShoulderRoll/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RShoulderRoll/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RShoulderRoll/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RShoulderRoll/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RShoulderRoll/Temperature/Sensor/Status | Temperature status |
See also: Right Arm joints.
RHipRoll¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RHipRoll/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RHipRoll/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RHipRoll/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RHipRoll/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RHipRoll/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RHipRoll/Temperature/Sensor/Status | Temperature status |
See also: Right Leg joints.
LHipRoll¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LHipRoll/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LHipRoll/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LHipRoll/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LHipRoll/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LHipRoll/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LHipRoll/Temperature/Sensor/Status | Temperature status |
See also: Left Leg joints.
LHipYawPitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LHipYawPitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LHipYawPitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LHipYawPitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LHipYawPitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LHipYawPitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LHipYawPitch/Temperature/Sensor/Status | Temperature status |
See also: Pelvis joints.
RHipPitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RHipPitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RHipPitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RHipPitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RHipPitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RHipPitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RHipPitch/Temperature/Sensor/Status | Temperature status |
See also: Right Leg joints.
LHipPitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LHipPitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LHipPitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LHipPitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LHipPitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LHipPitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LHipPitch/Temperature/Sensor/Status | Temperature status |
See also: Left Leg joints.
RKneePitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RKneePitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RKneePitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RKneePitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RKneePitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RKneePitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RKneePitch/Temperature/Sensor/Status | Temperature status |
See also: Right Leg joints.
LKneePitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LKneePitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LKneePitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LKneePitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LKneePitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LKneePitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LKneePitch/Temperature/Sensor/Status | Temperature status |
See also: Left Leg joints.
RAnklePitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RAnklePitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RAnklePitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RAnklePitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RAnklePitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RAnklePitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RAnklePitch/Temperature/Sensor/Status | Temperature status |
See also: Right Leg joints.
LAnklePitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LAnklePitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LAnklePitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LAnklePitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LAnklePitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LAnklePitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LAnklePitch/Temperature/Sensor/Status | Temperature status |
See also: Left Leg joints.
RAnkleRoll¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RAnkleRoll/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RAnkleRoll/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RAnkleRoll/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RAnkleRoll/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RAnkleRoll/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RAnkleRoll/Temperature/Sensor/Status | Temperature status |
See also: Right Leg joints.
LAnkleRoll¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LAnkleRoll/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LAnkleRoll/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LAnkleRoll/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LAnkleRoll/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LAnkleRoll/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LAnkleRoll/Temperature/Sensor/Status | Temperature status |
See also: Left Leg joints.
- Position/Actuator
Joint angle (in radian) to reach.
Exception: for hands, aperture (in percentage); 0 means closed, 1 means opened.
Content update:
- Position/Actuator (rad)
Joint angle (in radian) to reach.
Content update:
- Position/Actuator (%)
Hand aperture (in percentage) to reach; 0 means closed, 1 means opened.
Content update:
- Stiffness (%)
Stiffness of the joint (in percentage); 0.0 means 0% and 1.0 means 100% (full power).
In the motorboard, this percentage is directly applied to the max current. Setting the Stiffness to 0.5 means that the electric current limitation is reduced to 50%.
The Stiffness is sent to the motor board every DCM cycle time, so you can decrease/increase the control loop very fast. However, the current limitation may have some delay.
If the Stiffness is <0, the motor is free (no electromagnetic break), but due to hardware limitation, it’s only possible when the two motors of the same board are <0 (both are then free). If not, it’s still electromagnetic brake, but with a security that disable it when there is some movement, to protect the mechanics.
Stiffness may be automatically cut in case of problem (calibration, sensors …) seen at the DCM level or at the µc level, in order to protect the robot.
- Position/Sensor (rad)
Angle of the joint (in radian).
Content update:
The sensor used is a Magnetic Rotary Encoder (MRE), used like potentiometer. It’s a 12bits precise value (from 0 to 4095) change in rad.
- Position/Sensor (%)
Hand aperture (in percentage); 0 means closed, 1 means opened.
Content update:
The sensor used is a Magnetic Rotary Encoder (MRE), used like potentiometer. It’s a 12bits precise value (from 0 to 4095) change in percentage (0.0 to 1.0).
- Current (A)
Every motorboard has a current sensor for each motor that is a shunt resistor. The current is an absolute value in Ampere.
Every joint has an electric current limitation: if the current reach the “Max” value (“ElectricCurrent/Sensor/Max”) the PWM (return by the control loop) will be decreased a bit until it returns under the maximum value, and it’s increased again after. This is a kind of current control loop around the maximum value. The aim of this limitation is to protect the motor, the electronic board, and the mechanical part of the joint.
- Temperature (°C)
- The motor temperature is a simulated one, using electric current value of the motor. The motor board implements a temperature limitation to protect the motor. The temperature limitation depends on robot version.
- Temperature status
The status is computed accordingly to the temperature limitation to protecting the motor. A non null value implies an automatic correction of the Stiffness.
- 0: means regular temperature
- 1: means temperature has reach the max limit, start reducing stiffness.
- 2: means the joint is very hot, stiffness reduced over 30%.
- 3: means the joint is critically hot, stiffness value is set to 0.
Touch sensors¶
Head¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Head/Touch/Front/Sensor/Value | Touch (ON/OFF) |
| Device/SubDeviceList/Head/Touch/Rear/Sensor/Value | Touch (ON/OFF) |
| Device/SubDeviceList/Head/Touch/Middle/Sensor/Value | Touch (ON/OFF) |
See also: Tactile Head.
LHand¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LHand/Touch/Back/Sensor/Value | Touch (ON/OFF) |
| Device/SubDeviceList/LHand/Touch/Left/Sensor/Value | Touch (ON/OFF) |
| Device/SubDeviceList/LHand/Touch/Right/Sensor/Value | Touch (ON/OFF) |
See also: Tactile Hands.
RHand¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RHand/Touch/Back/Sensor/Value | Touch (ON/OFF) |
| Device/SubDeviceList/RHand/Touch/Left/Sensor/Value | Touch (ON/OFF) |
| Device/SubDeviceList/RHand/Touch/Right/Sensor/Value | Touch (ON/OFF) |
See also: Tactile Hands.
- Touch (ON/OFF)
- Touch sensors are capacitive sensors that return a 2 state float value 0.0 (unpressed) or 1.0 (pressed).
Switches¶
ChestBoard¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/ChestBoard/Button/Sensor/Value | Switch (ON/OFF) |
See also: Chest Button.
LFoot¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LFoot/Bumper/Right/Sensor/Value | Switch (ON/OFF) |
| Device/SubDeviceList/LFoot/Bumper/Left/Sensor/Value | Switch (ON/OFF) |
See also: Feet Bumpers.
RFoot¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RFoot/Bumper/Right/Sensor/Value | Switch (ON/OFF) |
| Device/SubDeviceList/RFoot/Bumper/Left/Sensor/Value | Switch (ON/OFF) |
See also: Feet Bumpers.
- Switch (ON/OFF)
Switches are simple sensors that return a 2-state float value 0.0 (unpressed) or 1.0 (pressed). Beware that the value is read only every 10ms, and very fast change may be unseen.
Warning
It’s better to use a logical “or” between the two switches of the same foot, and use it as one bumper only.
CPU¶
| Key | Comment |
|---|---|
| Device/SubDeviceList/Head/Temperature/Sensor/Value | Head cpu temperature (°C) |
Inertial¶
Gyroscope¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/InertialSensor/GyroscopeX/Sensor/Value | Gyroscope (rad/s) |
| Device/SubDeviceList/InertialSensor/GyroscopeY/Sensor/Value | Gyroscope (rad/s) |
| Device/SubDeviceList/InertialSensor/GyroscopeZ/Sensor/Value | Gyroscope (rad/s) |
See also: Inertial unit specifications.
Angle¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/InertialSensor/AngleX/Sensor/Value | Angles (rad) |
| Device/SubDeviceList/InertialSensor/AngleY/Sensor/Value | Angles (rad) |
| Device/SubDeviceList/InertialSensor/AngleZ/Sensor/Value | Angles (rad) |
See also: Inertial unit specifications.
Accelerometer¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/InertialSensor/AccelerometerX/Sensor/Value | Accelerometer (m/s²) |
| Device/SubDeviceList/InertialSensor/AccelerometerY/Sensor/Value | Accelerometer (m/s²) |
| Device/SubDeviceList/InertialSensor/AccelerometerZ/Sensor/Value | Accelerometer (m/s²) |
See also: Inertial unit specifications.
- Gyroscope (rad/s)
- Theses are direct rotation speed values in rad.s-1 from the inertial sensor in the center of the body. The Z gyroscope is not available yet.
- Accelerometer (m/s²)
- Theses are 3-axis acceleration in m.s-2 from the inertial sensor in the center of the body (one g is approximately 9.81 m.s-2) Depending the robot version, the precision is 8 or 12 bits.
- Angles (rad)
- The inertial board computes 3 inclination angles of the robot body with the gyro and accelero data. All angles are in radians. The Z angle is not available yet.
There are other deprecated values still returned.
LEDs¶
| Eyes - Ears- ChestBoard - Head - LFoot - RFoot |
Eyes¶
Face/Led/Red/Left¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Face/Led/Red/Left/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/45Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/90Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/135Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/225Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/270Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/315Deg/Actuator/Value | LED (%) |
See also: Eye LED locations.
Face/Led/Green/Left¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Face/Led/Green/Left/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/45Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/90Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/135Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/225Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/270Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/315Deg/Actuator/Value | LED (%) |
See also: Eye LED locations.
Face/Led/Blue/Left¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Face/Led/Blue/Left/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/45Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/90Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/135Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/225Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/270Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/315Deg/Actuator/Value | LED (%) |
See also: Eye LED locations.
Face/Led/Red/Right¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Face/Led/Red/Right/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/45Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/90Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/135Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/225Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/270Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/315Deg/Actuator/Value | LED (%) |
See also: Eye LED locations.
Face/Led/Green/Right¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Face/Led/Green/Right/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/45Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/90Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/135Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/225Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/270Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/315Deg/Actuator/Value | LED (%) |
See also: Eye LED locations.
Face/Led/Blue/Right¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Face/Led/Blue/Right/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/45Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/90Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/135Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/225Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/270Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/315Deg/Actuator/Value | LED (%) |
See also: Eye LED locations.
Ears¶
Ears/Led/Right¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Ears/Led/Right/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/36Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/72Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/108Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/144Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/216Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/252Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/288Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/324Deg/Actuator/Value | LED (%) |
See also: Ear LED locations.
Ears/Led/Left¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Ears/Led/Left/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/36Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/72Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/108Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/144Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/216Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/252Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/288Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/324Deg/Actuator/Value | LED (%) |
See also: Ear LED locations.
ChestBoard¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/ChestBoard/Led/Red/Actuator/Value | LED (%) |
| Device/SubDeviceList/ChestBoard/Led/Green/Actuator/Value | LED (%) |
| Device/SubDeviceList/ChestBoard/Led/Blue/Actuator/Value | LED (%) |
Head¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Head/Led/Rear/Left/0/Actuator/Value | LED (%) |
| Device/SubDeviceList/Head/Led/Rear/Left/1/Actuator/Value | LED (%) |
| Device/SubDeviceList/Head/Led/Rear/Left/2/Actuator/Value | LED (%) |
| Device/SubDeviceList/Head/Led/Rear/Right/0/Actuator/Value | LED (%) |
| Device/SubDeviceList/Head/Led/Rear/Right/1/Actuator/Value | LED (%) |
| Device/SubDeviceList/Head/Led/Rear/Right/2/Actuator/Value | LED (%) |
| Device/SubDeviceList/Head/Led/Middle/Right/0/Actuator/Value | LED (%) |
| Device/SubDeviceList/Head/Led/Front/Right/0/Actuator/Value | LED (%) |
| Device/SubDeviceList/Head/Led/Front/Right/1/Actuator/Value | LED (%) |
| Device/SubDeviceList/Head/Led/Front/Left/0/Actuator/Value | LED (%) |
| Device/SubDeviceList/Head/Led/Front/Left/1/Actuator/Value | LED (%) |
| Device/SubDeviceList/Head/Led/Middle/Left/0/Actuator/Value | LED (%) |
See also: Head tactile sensor LED locations.
LFoot¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LFoot/Led/Red/Actuator/Value | LED (%) |
| Device/SubDeviceList/LFoot/Led/Green/Actuator/Value | LED (%) |
| Device/SubDeviceList/LFoot/Led/Blue/Actuator/Value | LED (%) |
See also: Foot LED locations.
RFoot¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RFoot/Led/Red/Actuator/Value | LED (%) |
| Device/SubDeviceList/RFoot/Led/Green/Actuator/Value | LED (%) |
| Device/SubDeviceList/RFoot/Led/Blue/Actuator/Value | LED (%) |
See also: Foot LED locations.
Led state¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/ChestBoard/Led/State/Actuator/Value | LED state (number) |
- LED (%)
Every LED is a simple actuator that has a float value from 0.0 (no light) to 1.0 (full light). Each LED has only one color, but there could be 3 LEDs (RGB) at the same place to have a full color RGB LED. But for the DCM point of view it’s always 3 LEDs. The number of real differents values of leds depends on the leds (64 for the eyes, 256 for chest & foot)
Warning
Unfortunately, having 3 RGB LEDs set to “1.0” does not mean that you’ll see a perfect white: one or two LEDs will be brighter than others.
- LED state (number)
- Internal. Do not use.
Sonars¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/US/Actuator/Value | US/Actuator (number) |
| Device/SubDeviceList/US/Sensor/Value | US/Sensor (m) |
| Device/SubDeviceList/US/Left/Sensor/Value | US/Sensors (m) |
| Device/SubDeviceList/US/Right/Sensor/Value | US/Sensors (m) |
| Device/SubDeviceList/US/Left/Sensor/Value1 | US/Sensors (m) |
| Device/SubDeviceList/US/Left/Sensor/Value2 | US/Sensors (m) |
| Device/SubDeviceList/US/Left/Sensor/Value3 | US/Sensors (m) |
| Device/SubDeviceList/US/Left/Sensor/Value4 | US/Sensors (m) |
| Device/SubDeviceList/US/Left/Sensor/Value5 | US/Sensors (m) |
| Device/SubDeviceList/US/Left/Sensor/Value6 | US/Sensors (m) |
| Device/SubDeviceList/US/Left/Sensor/Value7 | US/Sensors (m) |
| Device/SubDeviceList/US/Left/Sensor/Value8 | US/Sensors (m) |
| Device/SubDeviceList/US/Left/Sensor/Value9 | US/Sensors (m) |
| Device/SubDeviceList/US/Right/Sensor/Value1 | US/Sensors (m) |
| Device/SubDeviceList/US/Right/Sensor/Value2 | US/Sensors (m) |
| Device/SubDeviceList/US/Right/Sensor/Value3 | US/Sensors (m) |
| Device/SubDeviceList/US/Right/Sensor/Value4 | US/Sensors (m) |
| Device/SubDeviceList/US/Right/Sensor/Value5 | US/Sensors (m) |
| Device/SubDeviceList/US/Right/Sensor/Value6 | US/Sensors (m) |
| Device/SubDeviceList/US/Right/Sensor/Value7 | US/Sensors (m) |
| Device/SubDeviceList/US/Right/Sensor/Value8 | US/Sensors (m) |
| Device/SubDeviceList/US/Right/Sensor/Value9 | US/Sensors (m) |
See also: Sonar specifications.
- US/Actuator (number)
Send a value to this Actuator to set and send a sonar wave.
The value you send defines what is the transmitter (left or right) and what is the receiver (left or right). Choosing the side of the receiver/transmitter has an influence on detection cone, and gives you information about the obstacle presence.
Wave settings
Mono side wave
The first bit of this value lets you choose which receiver you want to use. 0 for left and 1 for right.
The second bit lets you choose the transmitter. Again, 0 meaning left and 1 meaning right.
Value Transmitter Receiver 0.0 Left Left 1.0 Left Right 2.0 Right Left 3.0 Right Right
Multi side wave
- The third bit (value 4) means that two captures will be made with only one command, left and right. The results will be available in two subDevices: US/Left/Sensor and US/Right/Sensor. 10 values are available for each sensor, corresponding to the distance of the first 10 echoes detected.
- The fourth bit (value 8) orders the use of two transmitters at the same time.
Periodic capture
- The seventh bit (value 64) is used to register for a periodic capture. It means that you need to send the read request to the DCM just once, then you simply read the values every 100 ms in ALMemory. To stop the periodic mode, you can send a new reading command without that bit.
Examples
All the bits combinations are not useful, even possible. Here are examples:
Value Transmitter Receiver 4.0 Right and Left Right and Left 12.0 (8.0 + 4.0) Right and Left Right and Left 68.0 (64.0 + 4.0) Right and Left Right and Left Results
The result is written approximately 10ms after in US/Sensor/Value or US/Left/Sensor and US/Right/Sensor.For further details, see: US/Sensor (m) or US/Sensors (m).- US/Sensor (m)
Value returned by the Sonar sensor (one of the two sensors in the chest). The value is changed about 10ms after sending the wave using US/Actuator/Value. For further details, see: US/Actuator (number).
It is in meters.Result <=0 or >= 5 Max Detection range means error from the sensor or echo not detected.For further details about range detection, see: Sonar specification.Tips:
- You’ll likely detect the ground before the maximum distance for detection.
- Be careful you can detect the robot arms!
- The emission cone depends on the size of the object in front of the robot.
- The quality of the detection will depends on the object (or obstacle): size, surface, orientation.
- US/Sensors (m)
US/Right/Sensor/Value and US/Left/Sensor/Value Sensors respectively dedicated to the left or right receivers.
They are used if the third bit is set in the value sent to the actuator (only available for V2 cards).
The results of the first echo detected on each receiver are in Value, the 9 following echoes are from Value1 to Value9.
Value of 0 means an error. A value of Max Detection range means no echo.
For example, if Value contains 0,40, Value1 1,2 and Value2 Max Detection range, the following values (3 to 9) will contain Max Detection range too. It probably means you have the echo of the ground at 0,40m and another object at 1,2m. Left and Right sensors work the same way and allow you to locate objects.
Battery¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Battery/Current/Sensor/Value | current Sensor (A) |
| Device/SubDeviceList/Battery/Charge/Sensor/Value | Charge Sensor (%) |
| Device/SubDeviceList/Battery/Temperature/Sensor/Value | Temperature Sensor (%) |
See also: Battery specifications.
FSR¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LFoot/FSR/FrontLeft/Sensor/Value | FSR (kg) |
| Device/SubDeviceList/LFoot/FSR/FrontRight/Sensor/Value | FSR (kg) |
| Device/SubDeviceList/LFoot/FSR/RearLeft/Sensor/Value | FSR (kg) |
| Device/SubDeviceList/LFoot/FSR/RearRight/Sensor/Value | FSR (kg) |
| Device/SubDeviceList/RFoot/FSR/FrontLeft/Sensor/Value | FSR (kg) |
| Device/SubDeviceList/RFoot/FSR/FrontRight/Sensor/Value | FSR (kg) |
| Device/SubDeviceList/RFoot/FSR/RearLeft/Sensor/Value | FSR (kg) |
| Device/SubDeviceList/RFoot/FSR/RearRight/Sensor/Value | FSR (kg) |
| Device/SubDeviceList/LFoot/FSR/TotalWeight/Sensor/Value | FSR total (kg) |
| Device/SubDeviceList/RFoot/FSR/TotalWeight/Sensor/Value | FSR total (kg) |
| Device/SubDeviceList/LFoot/FSR/CenterOfPressure/X/Sensor/Value | center of pressure (m) |
| Device/SubDeviceList/LFoot/FSR/CenterOfPressure/Y/Sensor/Value | center of pressure (m) |
| Device/SubDeviceList/RFoot/FSR/CenterOfPressure/X/Sensor/Value | center of pressure (m) |
| Device/SubDeviceList/RFoot/FSR/CenterOfPressure/Y/Sensor/Value | center of pressure (m) |
See also: FSRs specifications.
- FSR (kg)
The returned value is approximate.
Good practice: instead of the value itself, take in account the variation of the value, in order to detect any change at foot contact level.
- FSR total (kg)
- The total weight value is the sum of all 4 FSR of the foot.
- center of pressure (m)
- CenterOfPressure values are computed barycenter of FSR (using individual weight and position) for each foot. The value returned is in m for X and Y, from the foot reference. Using centerOfPressure and weight from both foot, you can compute a barycenter for all weight on the robot.
Warning
When the weight on the foot is very low, the center of pressure will likely be bad.
Warning
If the real center of pressure go outside the 4 FSR parallelogram, the value of weight and centre of pressure could become bad, due to internal mechanical constraint.