

Autonomous Robotics System , Platform independent. Free to use.Compatible with any cloud Service like RemoHospital System
Learn More

Join our Forums to improve RemoRobo.
RemoRobo is based on set of technologies and tricks working together to produce the complete system.










RemoRobo and RoboHospital are full integrated.
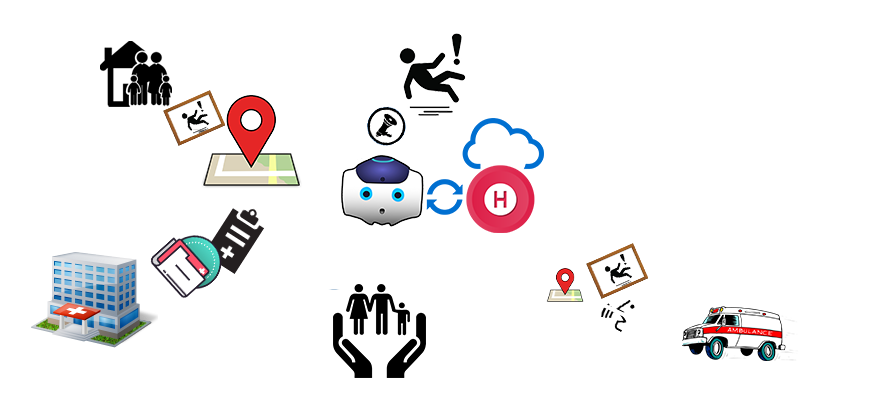
An example of RemoRobo and RoboHospital integration is in fall down detection RemoRobo does many actions in the same time automatically. RemoRobo notify family members that there is a problem with this person also send picture and location , Call Ambulance ,RoboHospital will Check his insurance profile to detect the nearist hospital possible ,Send his profile to that hospital , Follow it's instruction as possible. For the meanwhile RoboHospital follow up the position of ambulance car and send updates to user and family members.
Middle button on the head used to switch between User execution mood and Debugging mode :
Debugging mood: RemoRobo will inform you for everything it does and inform you by all leds and foot bumpers .
Live moodIgnore the notifications which not related to the user and alerts for none critical errors nested of that , most information will be by Application bumper and leds
Recognition :
Facial Recognition RemoRobot can recognize you , all your family members , also deal with each of you individually according to the situation,
Object recognitionRemoRobo can detect objects and deal with them , Check Remorobo-RoboHospital integration as well.
Announcement (Eyes Leds ):
currently eyes leds is the main user interface language before talking and while interacting with user.
It welcome you in startup , Flash when receive a command from you.
Also.
Lights Types:
White : Idel mood.
One time on green Okay / confirm, then back to idle mood.
warning , Error: not yet implemented.
Speackers and loading leds :
Speacers:
RemoRobo using speakers to inform you for the result of the current command or give you advice for current activity.
According to the event level it may use the seekers or only leds in the foots.
Loading leds (ear leds ) used to notify you that the current request in progress or in the idle mood.
Chest Button:
Power button is a special purpose button, used for power on the NAO robot and other Naoqi Operating System operations. For that reasons , RemoRobo avoided using it in Application.
Hands Sensors
Hands Sensors is currently not used by RemoRobo system due to the development stage , but in the later versions will be used to interact with user beside legs when Adding more Applications than the currently available.
Application Notifications:
Led used to notify user for updates or alert for something.
It is used also to get attention to let user know that there is something should know.
It divided into four status :
White fading : Idle mood.(default),Yellow feeding: Warning, Red blinking :Error, flashing for one second with green Dismiss:(When press on Application bumper ) then back to Idle mood.
Programming Notifications:
RGB Led responsible about programming issues and related events:
But it used for development errors or issues related to the core system code or bugs not to the application.
It has four moods colors have moods Colors. Please check colors in point 7 (Application Notifications )
Application bumper Is the main communication with the user in case of any errors , warning or notification happened, RemoRobo can hold notification inside Managed notification program until you push its legs bumper, so RemoRobo will say by speaker any application message if it is still exist. (Usually the led (7) on the right foot will notify you as well)
Programming bumper operation and programming errors , worming and notifications. It will let the RemoRobo tell you if any programming issue or not (Usually used for debugging purpose not for End user), except critical exceptions. (Usually the led on left foot (8) will notify you as well)
 RemoRobo can share your best moments with your family and friends with photos and comments.
RemoRobo can share your best moments with your family and friends with photos and comments.
 RemoRobo can give you advice for your daily life with updates from internet. also follow up your health life if you connected it to RoboHospital system as well.
RemoRobo can give you advice for your daily life with updates from internet. also follow up your health life if you connected it to RoboHospital system as well.
 RemoRobo can share you your practice and record your achievements , compare it to the previous records also save it in your profile
RemoRobo can share you your practice and record your achievements , compare it to the previous records also save it in your profile
 RemoRobo is self updated with latest version of software and AI features also , keep other cloud system updated by your status like RoboHospital for health situation. also Update its knowledge from internet.
RemoRobo is self updated with latest version of software and AI features also , keep other cloud system updated by your status like RoboHospital for health situation. also Update its knowledge from internet.
 RemoRobo is environment aware using object, voice and face recognition, so you can play with it by show it anythings and RemoRobo will tell you what is these things, also it used to recognize your health status in case of emergency.
RemoRobo is environment aware using object, voice and face recognition, so you can play with it by show it anythings and RemoRobo will tell you what is these things, also it used to recognize your health status in case of emergency.
 RemoRobo can send an email for you by voice command , also RemoRobo can read your unread message ,or even Notify you that you received a new email so you can let it read it for you later..
RemoRobo can send an email for you by voice command , also RemoRobo can read your unread message ,or even Notify you that you received a new email so you can let it read it for you later..
RemoRobo can copy your movement and do it for you again (for now By connecting Kinect to the host computer , the benefit for that is motivation aor later you can automate an activity by letting RemoRobo do it by itself (Currently this feature requires a Robot Hardware and Kinect device )

Integration is one of the keys RemoRobo features , because it allows RemoRobo to be alive and do many activities in the same time , as well as following up remote requests from cloud beside it's automous life activities. , like RoboHospital integration .
Currently installation requires host computer /Microcomputer to keep RemoRobo Robot independent




 Python
Python  NAOqi Robot
NAOqi Robot
 RoboHospital
RoboHospital